netconvert、 netgenerate 和 netedit 共享相同的网络构建过程,该过程在读取数据后(在 netconvert 中)或在生成内部描述后(在 netgenerate 中)立即开始。
该过程要求至少给定节点和边,可选地还包括边和/或车道之间的连接以及其他可选信息。关于如何构建网络的提示——例如是否应添加掉头或高速公路匝道,是否应猜测交通灯或环岛等——均从选项中获取。
下面,您可以找到构建网络时执行的所有步骤的列表。可选步骤以斜体表示。
- 修改节点和边的集合
- 连接交叉口簇
- 移除自环
- 移除孤立道路
- 移除不需要的边
- 移除空节点和几何节点
- 连接相似的边
- 拆分几何边
- 猜测并设置匝道
- 将网络移至原点
- TLS(交通灯系统)位置计算
- 将节点分配给交通灯
- 连接交通灯节点
- 计算车道之间的连接
- 计算转弯方向
- 对节点的边进行排序
- 计算被接近的边
- 计算接近的车道
- 在被接近的车道上划分车道
- 附加掉头
- 重新检查车道末端
- 几何计算
- 计算节点形状
- 计算边形状
- 计算通行权和交通灯程序
- 计算 TLS 逻辑
- 计算节点逻辑
- 计算交通灯逻辑
- 完成内部边
这些计算步骤在 void NBNetBuilder::compute(OptionsCont &oc) 中执行。以下将更详细地描述这些步骤。
步骤#
- 前置条件:所有输入已读取
- 前置条件:节点具有:id、笛卡尔坐标、类型(可选,可能更改)
- 前置条件:边具有:有效的起始/终止节点、车道数量、最大速度限制、允许的车辆类别、几何形状(可能更改)、typeID、车道分布信息、名称(可选)、优先级信息(可选)
#1: 修改节点和边的集合#
目的:从内部表示中移除不需要的边/节点;如果需要,添加几何节点 后置条件:所有不需要的元素(节点、边)被移除,如果需要则插入/移除几何节点,属性如上所述
执行以下子步骤:
-
joinJunctions('
连接交叉口簇'):构建节点簇目的:连接形成单个交叉口的网络图节点。 后置条件:交叉口已连接,属性如上所述 影响:移除并添加节点,移除边,重新映射连接(待定) 状态:待定
-
removeSelfLoops('
移除自环'):移除所有起始节点与终止节点相同的边后置条件:每条边都是两个不同节点之间的单向连接(确定) 状态:对我而言是绿色,但我不确定为什么要构建边列表然后提供给重新映射方法;在重新映射方法中检查连接是否存在是否足够?
-
joinSimilarEdges('
连接相似的边'):连接连接相同节点的边后置条件:不存在两条具有相同几何形状且连接相同节点的边 状态:黄色,因为代码中有两个注释,一个是关于 bug,第二个是关于缺少对车辆类别的检查;应重新审视(为什么在这里,如果不这样做会发生什么) 注释:?之前,只有一条道路可以连接相同的交叉口;现在不是了。为什么,解释一下,它是如何工作的? 注释:此方法使用两个魔术数字来确定边是否“相似”:
distanceThreshold = 7.;// 不要合并距离更远的边lengthThreshold = 0.10;// 不要合并相对长度差异更大的边
-
removeIsolatedRoads('
查找孤立道路'):移除孤立的边(不属于网络的一部分)后置条件:?未在某处定义 状态:黄色;该方法相当大,并且在 TLS 控制中没有移除边;它是如何工作的? 注释:应重新审视
-
removeUnwishedEdges('
移除不需要的边'):移除不在 myEdges2Keep 中的边后置条件:不需要的边不再在内部容器中(确定) 状态:黄色;完整的 keep/remove/keep-postload - 内容应重新审视
-
removeUnwishedNodes('
移除空节点和几何节点' 或 '移除空节点'):移除无用的节点后置条件:空节点、没有传入/传出边的节点被移除(确定) 后置条件:仅影响边几何形状的节点在需要时被移除(确定) 状态:黄色;应分两步进行以获得更清晰的代码;此外,我们曾遇到过 bug,即空的 acosta 节点仍在网络中;这解决了吗?
-
splitGeometry('
拆分几何边'):在几何位置拆分边后置条件:如果需要,边仅具有线性几何形状 状态:黄色;构建的节点命名不当
-
Guessing on-/off-ramps(
猜测并设置匝道)目的:添加缺失的匝道 状态:待定
作为结果,读取/生成的网络的内部表示包含用户想要的节点/边集合。
#2: 将网络移至原点#
目的:让网络坐标从 0,0 开始 状态:绿色
#3: TLS 位置计算#
目的:让节点知道它们是否由交通灯控制
-
guessTLs('
将节点分配给交通灯')后置条件:空节点、没有传入/传出边的节点被移除(确定) 状态:待定
-
joinTLS('
连接交通灯节点')后置条件:空节点、没有传入/传出边的节点被移除(确定) 状态:待定
#4: 连接计算#
目的:确定和/或分配交叉口之间车道的连接
计算转弯方向#
- 代码: NBTurningDirectionsComputer::computeTurnDirections(...);
- 后置条件: 边知道其掉头方向(如果存在)。
- 原因: 掉头在后续步骤中与其他行驶方向的处理方式不同。
- 方法
对于每条可能连接的传入边和传出边的组合,我们计算它们之间的角度。如果此角度 >160°,我们假设这可能是一个掉头。如果两条边以不同方向连接相同的两个节点,我们将此角度加上 360°。我们将带有角度的边对存储到一个按角度降序排序的列表中。计算完所有组合后,我们遍历该列表,并将首先看到的那些设置为掉头,标记传入和传出边都已被使用,以避免使用它们两次。如果一条边以 >360° 的角度出现两次——即多条边连接两个相同的节点——我们会发出警告。
-
状态: 黄色
连接检查应在此处省略,请参见内联文档 像往常一样,您可能会发现病态交叉口
对节点的边进行排序#
- 代码: NBNodesEdgesSorter::sortNodesEdges(...);
- 后置条件: 每个节点的边(传入、传出和所有边)按顺时针方向排序,从 12 点钟方向开始。具有相同角度的传入边在所有边的列表中位于相应的传出边之前。
- 原因: 假设在后续计算步骤中给定此顺序
- 方法
我们首先对节点的边向量(传入、传出、所有)进行排序。然后,我们遍历所有边的向量,如果传入边和传出边具有相同角度,并且传入边在传出边之后(使用 "isTurningDirection" 确定),则交换它们。
-
状态: 黄色
未针对左侧行驶网络进行验证 该方法使用方法 "NBEdge::isTurningDirectionAt(...)",这不是对先前执行的掉头计算的简单使用
计算节点类型#
- 代码: NBNodeTypeComputer::computeNodeTypes(...);
- 后置条件: 每个节点具有以下类型之一: NODETYPE_PRIORITY_JUNCTION, NODETYPE_RIGHT_BEFORE_LEFT, NODETYPE_TRAFFIC_LIGHT, NODETYPE_NOJUNCTION(?)。
- 原因: 我们需要这个来计算通行权规则。
- 方法
我们单独研究每个节点。首先检查一些特殊情况:
- 如果类型已设置 (myType != NODETYPE_UNKNOWN) -> 跳过
- 如果我们只有一条传入边 -> 设置为 NODETYPE_PRIORITY_JUNCTION
- 如果是简单延续 -> 设置为 NODETYPE_PRIORITY_JUNCTION
首先,我们假设交叉口是 NODETYPE_RIGHT_BEFORE_LEFT 类型。然后我们遍历所有不相对的传入边组合。一旦我们遇到两条边之间的速度限制差异超过 10km/h(大约),我们将类型设置为 NODETYPE_PRIORITY_JUNCTION。如果其中一条边的速度限制超过 49km/h(我们使用此值以避免浮点问题),情况也是如此。
-
状态: 黄色
研究是否可以更早设置 NODETYPE_NOJUNCTION(由用户) 使用的方法 "getOppositeIncoming" 应重新验证
计算优先级#
- 代码: NBEdgePriorityComputer::computeEdgePriorities(...);
- 后置条件: 每条边在其起始和结束的节点处都有一个优先级。起始节点和终止节点处的优先级可能不同。边的优先级为 1(优先级较高)或 0(优先级较低或全部相等)。
- 原因: 我们需要这个来计算通行权规则。
- 方法
所有优先级初始化为 0。
- 状态: 橙色
#5: 几何计算#
#6: 计算通行权和交通灯程序#
#7: 完成内部边(可选)#
旧版#
步骤 #9-#10: 计算特定信号/通行权#
步骤 #11-#17: 计算和设置车道到车道的连接#
步骤 #18-#19: 计算几何形状#
我目前关注的是边的形状,因为即使是 eworld 或 TrafficModeler 导出在调试模式下也在此处停止。它在 NBEdge::computeEdgeShape 中。(实际上,据我理解,这个方法是关于这条边的车道形状。)在此算法中,必须区分以下三种情况:
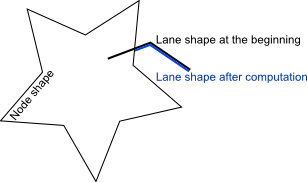 |
边的形状与节点形状相交。然后,形状被修剪到交点。这看起来相当合理。 |
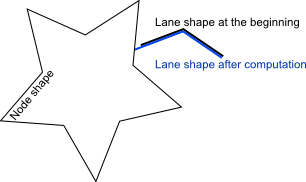 |
边的形状在节点形状之外。当前的算法外推边形状的最后一行,并将边扩大到新的交点。这对我来说也看起来很合理。 |
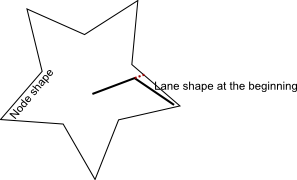 |
边的形状完全在节点形状内。这里应该发生什么?(红点显示了 netconvert 目前的做法。) |
因此我想知道,在第三种情况下,netconvert 的正确行为应该是什么。
步骤 #20-#22: 计算通行权规则#
步骤 #23: 应用额外的偏移量#
表格#
| 操作 | 影响 | ||
|---|---|---|---|
| 节点 | 边 | 连接 | |
| 调整输入 | x | x | x |
'构建交叉口簇' |
x | x | x |
'移除自环' |
x | x | |
'连接相似的边' |
|||
'查找孤立道路' |
|||
'移除不需要的边' |
|||
'移除空节点和几何节点' 或 '移除空节点' |
|||
'拆分几何边' |
|||
'猜测并设置匝道' |
|||
| 将网络移至原点 | |||
| TLS 位置计算 | |||
| 将节点分配给交通灯 | |||
| 连接交通灯节点 | |||
| 计算车道之间的连接 | |||
| 计算转弯方向 | |||
| 对节点的边进行排序 | |||
| 计算被接近的边 | |||
| 计算接近的车道 | |||
| 在被接近的车道上划分车道 | |||
| 附加掉头(可选) | |||
| 重新检查车道末端 | |||
| 几何计算 | |||
| 计算节点形状 | |||
| 计算边形状 | |||
| 计算通行权和交通灯程序 | |||
| 计算 TLS 逻辑 | |||
| 计算节点逻辑 | |||
| 计算交通灯逻辑 | |||
| 完成内部边(可选) |